YachtLINES Autonome
|

|

|

|

|

|

|
ShipLINES Autonome
|

Analyse Géométrique
|

Hydrostatique
|

Propulsion
|
Sections
|
Courbes et Surfaces
|
Génération Paramétrique de Coque
|
IntelliHull
|
X-Topologie, Surfaces Multi-Patch
|
Préparation et utilisation des nuages de points de levés pour la modélisation de la surface de la coque dans PolyCAD (Original)
Introduction
Cet article traite du processus d'importation, de préparation et d'utilisation d'un nuage de points pour produire une surface de coque dans PolyCAD à l'aide des outils X-Topology. Les objectifs spécifiques et un résumé technique de l'approche utilisée pour prendre en charge les ensembles de données de nuages de points sont présentés avant que le processus ne soit introduit. Le processus peut être résumé comme suit :
Contexte
Le défi
La fonction Nuage de points de PolyCAD a pour but de fournir un moyen de générer des surfaces de coque à partir de scénarios d'arpentage réalistes, c'est-à-dire lorsque la scène capturée contient des artefacts de support et de travail typiques des zones sèches, flottantes ou dures. Pour un logiciel générique capable d'ajuster des surfaces à des données de surface, ce cas représente souvent un défi car le fait de laisser ces informations affecte la précision de la surface et le fait de les supprimer exclut ces données du processus de définition de la surface, même si elles ne sont pas utilisées.
Les algorithmes d'ajustement typiques produisent des surfaces dont les points de définition sont uniformément répartis sur les données échantillonnées. Pour s'adapter à des caractéristiques de forme spécifiques avec un certain degré de précision, il est nécessaire d'utiliser un grand nombre de points. Des outils de modélisation solide peuvent alors être nécessaires pour réduire les bords ou sélectionner les caractéristiques. À la fin de ce processus, la définition obtenue peut être complexe et limiter la gamme des applications logicielles d'ingénierie dans lesquelles elle peut être utilisée. Comme l'industrie maritime repose sur la géométrie de surface et qu'il existe de nombreux outils d'analyse technique rentables qui fonctionnent correctement avec des représentations plus simples, il est nécessaire de produire efficacement des surfaces de coque qui capturent précisément la forme avec un nombre optimal de points de définition.
Introduction
Cet article traite du processus d'importation, de préparation et d'utilisation d'un nuage de points pour produire une surface de coque dans PolyCAD à l'aide des outils X-Topology. Les objectifs spécifiques et un résumé technique de l'approche utilisée pour prendre en charge les ensembles de données de nuages de points sont présentés avant que le processus ne soit introduit. Le processus peut être résumé comme suit :
- Importation d'un jeu de données de nuages de points contenu dans un fichier texte, un fichier e57 ou à partir d'une base de données de nuages de points existante.
- Validation et transformation de l'ensemble de données dans la position et l'orientation souhaitées.
- Optimisation du jeu de données en générant une carte spatiale
- Visualisation du jeu de données
- Génération de courbes topologiques en X à partir du nuage de points.
- Validation de la surface par rapport au jeu de données.
- Les défis de l'ajustement automatique d'une surface aux points du nuage.
Contexte
Le défi
La fonction Nuage de points de PolyCAD a pour but de fournir un moyen de générer des surfaces de coque à partir de scénarios d'arpentage réalistes, c'est-à-dire lorsque la scène capturée contient des artefacts de support et de travail typiques des zones sèches, flottantes ou dures. Pour un logiciel générique capable d'ajuster des surfaces à des données de surface, ce cas représente souvent un défi car le fait de laisser ces informations affecte la précision de la surface et le fait de les supprimer exclut ces données du processus de définition de la surface, même si elles ne sont pas utilisées.
Les algorithmes d'ajustement typiques produisent des surfaces dont les points de définition sont uniformément répartis sur les données échantillonnées. Pour s'adapter à des caractéristiques de forme spécifiques avec un certain degré de précision, il est nécessaire d'utiliser un grand nombre de points. Des outils de modélisation solide peuvent alors être nécessaires pour réduire les bords ou sélectionner les caractéristiques. À la fin de ce processus, la définition obtenue peut être complexe et limiter la gamme des applications logicielles d'ingénierie dans lesquelles elle peut être utilisée. Comme l'industrie maritime repose sur la géométrie de surface et qu'il existe de nombreux outils d'analyse technique rentables qui fonctionnent correctement avec des représentations plus simples, il est nécessaire de produire efficacement des surfaces de coque qui capturent précisément la forme avec un nombre optimal de points de définition.
La solution
L'industrie maritime a été à l'avant-garde de la représentation et de la définition des surfaces pour les formes de coque, car ces informations sont essentielles à la conception et à la production des navires. Peu d'applications prennent en charge les nuages de points, car il s'agit d'un défi différent en raison de la grande quantité de données impliquées. Les outils de modélisation de courbes et de surfaces X-Topology de PolyCAD mettent en œuvre une approche marine de la définition de la surface de la coque en utilisant un réseau de courbes pour gérer la génération de patchs de surface afin de capturer des caractéristiques précises telles que les jointures et de varier la taille des patchs représentant les grandes zones planes avec des patchs minimaux et les zones à forte courbure de manière plus détaillée. La génération d'une définition de surface à l'aide de courbes permet au modélisateur de capturer sélectivement les zones de la coque dans les données de sondage qui sont bonnes, d'ignorer celles qui sont mauvaises et de créer manuellement une définition dans les zones importantes qui peuvent être fortement perturbées, comme le long de la quille. La mise en œuvre des méthodes d'ajustement des courbes telles que les moindres carrés est beaucoup plus simple que le cas correspondant pour une surface et l'algorithme est facilement étendu pour incorporer les concepts d'intention de conception dans le réseau de courbes et les techniques traditionnelles de lissage (carénage). Pour aider le modélisateur, la surface peut être analysée par rapport au nuage de points à différentes tolérances. Ces statistiques peuvent être présentées graphiquement afin de mettre en évidence les zones de la surface qui doivent être améliorées et de communiquer aux responsables ou aux clients le niveau de précision atteint.
La technologie
Fichiers
Les outils de nuage de points de PolyCAD fonctionnent sur la base de la conservation d'un minimum de données en mémoire et de l'optimisation des opérations sur les fichiers et les bases de données. La taille de la base de données n'est limitée que par le maximum que le système d'exploitation peut supporter. Cependant, étant donné que les données sont généralement chargées dans des fichiers texte et que ceux-ci sont moins efficaces en termes de stockage que la base de données binaire, il existe une limitation supplémentaire. En réalité, pour les surfaces de coques, les très grands ensembles de données n'offrent aucun avantage en termes de précision, mais ils ralentissent les activités de traitement permettant au modéliste d'apprécier la géométrie qu'ils contiennent.
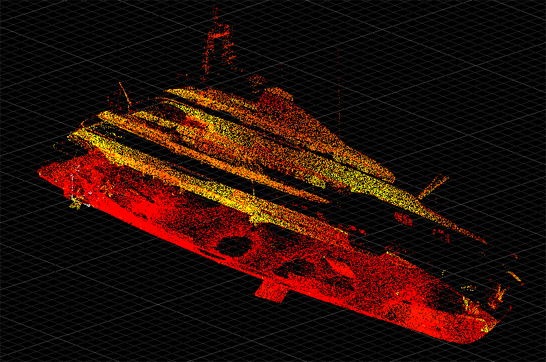
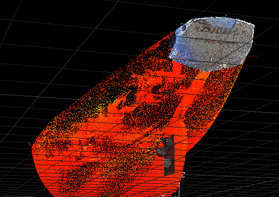
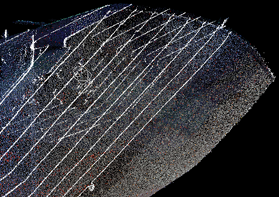
Visualisation
La visualisation du nuage de points est réalisée en présentant les points comme de simples pixels et la couleur ou l'intensité est prise en charge. La visualisation du nuage entier lors de la modélisation d'une surface n'est pas particulièrement efficace car il est difficile de percevoir la profondeur, et donc la forme. Des techniques élaborées et incrémentielles sont disponibles dans d'autres outils mais cela peut être perturbant lors de la modélisation. Sectionner le nuage de points pour révéler les contours de la coque est un moyen bien plus efficace d'apprécier la forme lorsque l'on travaille avec une surface de coque. La taille maximale d'une seule visualisation est de 1 million de points, limitée par la quantité maximale de données acceptée par les pilotes de logiciels et pouvant être téléchargée sur les cartes graphiques, soit environ 32 Mo. Plusieurs volumes de visualisation sont supportés et peuvent être utilisés pour varier le niveau de détail affiché dans différentes zones des données de l'enquête.
L'industrie maritime a été à l'avant-garde de la représentation et de la définition des surfaces pour les formes de coque, car ces informations sont essentielles à la conception et à la production des navires. Peu d'applications prennent en charge les nuages de points, car il s'agit d'un défi différent en raison de la grande quantité de données impliquées. Les outils de modélisation de courbes et de surfaces X-Topology de PolyCAD mettent en œuvre une approche marine de la définition de la surface de la coque en utilisant un réseau de courbes pour gérer la génération de patchs de surface afin de capturer des caractéristiques précises telles que les jointures et de varier la taille des patchs représentant les grandes zones planes avec des patchs minimaux et les zones à forte courbure de manière plus détaillée. La génération d'une définition de surface à l'aide de courbes permet au modélisateur de capturer sélectivement les zones de la coque dans les données de sondage qui sont bonnes, d'ignorer celles qui sont mauvaises et de créer manuellement une définition dans les zones importantes qui peuvent être fortement perturbées, comme le long de la quille. La mise en œuvre des méthodes d'ajustement des courbes telles que les moindres carrés est beaucoup plus simple que le cas correspondant pour une surface et l'algorithme est facilement étendu pour incorporer les concepts d'intention de conception dans le réseau de courbes et les techniques traditionnelles de lissage (carénage). Pour aider le modélisateur, la surface peut être analysée par rapport au nuage de points à différentes tolérances. Ces statistiques peuvent être présentées graphiquement afin de mettre en évidence les zones de la surface qui doivent être améliorées et de communiquer aux responsables ou aux clients le niveau de précision atteint.
La technologie
Fichiers
Les outils de nuage de points de PolyCAD fonctionnent sur la base de la conservation d'un minimum de données en mémoire et de l'optimisation des opérations sur les fichiers et les bases de données. La taille de la base de données n'est limitée que par le maximum que le système d'exploitation peut supporter. Cependant, étant donné que les données sont généralement chargées dans des fichiers texte et que ceux-ci sont moins efficaces en termes de stockage que la base de données binaire, il existe une limitation supplémentaire. En réalité, pour les surfaces de coques, les très grands ensembles de données n'offrent aucun avantage en termes de précision, mais ils ralentissent les activités de traitement permettant au modéliste d'apprécier la géométrie qu'ils contiennent.
Visualisation
La visualisation du nuage de points est réalisée en présentant les points comme de simples pixels et la couleur ou l'intensité est prise en charge. La visualisation du nuage entier lors de la modélisation d'une surface n'est pas particulièrement efficace car il est difficile de percevoir la profondeur, et donc la forme. Des techniques élaborées et incrémentielles sont disponibles dans d'autres outils mais cela peut être perturbant lors de la modélisation. Sectionner le nuage de points pour révéler les contours de la coque est un moyen bien plus efficace d'apprécier la forme lorsque l'on travaille avec une surface de coque. La taille maximale d'une seule visualisation est de 1 million de points, limitée par la quantité maximale de données acceptée par les pilotes de logiciels et pouvant être téléchargée sur les cartes graphiques, soit environ 32 Mo. Plusieurs volumes de visualisation sont supportés et peuvent être utilisés pour varier le niveau de détail affiché dans différentes zones des données de l'enquête.
Carte spatiale
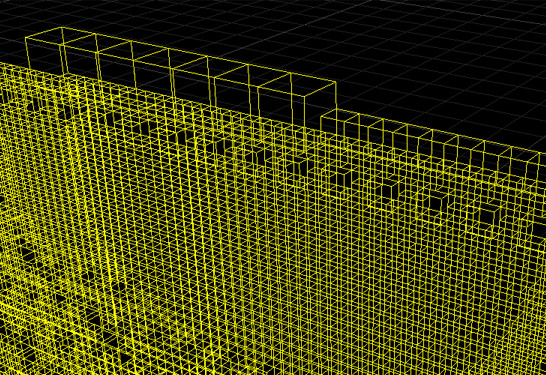
Sans structure, l'accès aux grands ensembles de données peut être lent, surtout lorsque les données sont stockées dans des fichiers. Pour améliorer les performances, l'ensemble de données peut être optimisé en une carte spatiale pour capturer les points d'organisation et comprendre où les données sont stockées. Les opérations de visualisation et de sectionnement seront nettement plus rapides lorsqu'elles seront cartographiées, car il ne sera pas nécessaire de rechercher l'ensemble des données. La validation de surface ne fonctionnera pas sans une carte spatiale.
Dans PolyCAD, le nuage de points est structuré à l'aide de voxels (éléments de volume / cuboïdes) disposés en octogone. Cette structure peut tenir compte des différentes densités spatiales des points dans l'espace, générant plus de subdivision à mesure que la densité augmente. L'optimisation de l'ensemble de données peut prendre du temps, prenez un café. Seule une quantité limitée d'organisation peut se produire en mémoire et un certain nombre de fichiers temporaires sont utilisés. Pour que l'optimisation soit réussie, il faut que le dossier contenant les fichiers temporaires de Windows dispose d'un espace permettant d'accueillir l'ensemble de données au moins deux fois. L'optimisation est effectuée sur une copie de la base de données et les fichiers sont échangés si le processus est réussi. Le meilleur moment pour effectuer l'optimisation est directement après la vérification et/ou la mise à jour de la position et de l'orientation de l'ensemble de données. Cependant, si le jeu de données est volumineux et que plusieurs itérations de transformation sont nécessaires pour positionner précisément le jeu de données, il peut être préférable d'optimiser le jeu de données avant et après le processus de transformation.
Transformation
Le nuage de points peut devoir être positionné et orienté s'il n'est pas exactement dans la bonne position et orientation. Dans un premier temps, les transformations sont appliquées aux données de coordonnées et aux requêtes sous forme d'opération matricielle lorsque les données sont interfacées. Cela permet de repositionner rapidement le nuage sans avoir à mettre à jour l'ensemble de la base de données. Les entités distinctes Visualisation de points de nuage et Section de points de nuage ne sont pas mises à jour lorsque le jeu de données de points de nuage est transformé, car il est probable qu'elles ne soient plus positionnées correctement. Il est préférable de les supprimer, mais elles peuvent être mises à jour manuellement. Lorsque la carte spatiale est générée, les points de coordonnées sont transformés au cours du processus et la matrice de transformation interne est réinitialisée.
Préparation d'un ensemble de données de points de nuage pour la modélisation
Il existe trois options pour importer des données de levés Cloud Point dans l'application. Les données peuvent être importées à partir de fichiers texte, d'un fichier e57 ou d'une base de données de nuages de points existante.
Importation de points de données à partir d'un fichier texte
Afin d'utiliser un nuage de points laser dans PolyCAD, les données doivent être converties en une base de données de nuages de points (pcdb). Les données d'un fichier texte peuvent être transformées en une base de données de nuages de points à l'aide de l'option de la barre d'outils. Sélectionnez l'onglet Relevés de points de nuage et dans le groupe Importer/Convertir, il y a un bouton intitulé Importer le texte dans la base de données.
Sans structure, l'accès aux grands ensembles de données peut être lent, surtout lorsque les données sont stockées dans des fichiers. Pour améliorer les performances, l'ensemble de données peut être optimisé en une carte spatiale pour capturer les points d'organisation et comprendre où les données sont stockées. Les opérations de visualisation et de sectionnement seront nettement plus rapides lorsqu'elles seront cartographiées, car il ne sera pas nécessaire de rechercher l'ensemble des données. La validation de surface ne fonctionnera pas sans une carte spatiale.
Dans PolyCAD, le nuage de points est structuré à l'aide de voxels (éléments de volume / cuboïdes) disposés en octogone. Cette structure peut tenir compte des différentes densités spatiales des points dans l'espace, générant plus de subdivision à mesure que la densité augmente. L'optimisation de l'ensemble de données peut prendre du temps, prenez un café. Seule une quantité limitée d'organisation peut se produire en mémoire et un certain nombre de fichiers temporaires sont utilisés. Pour que l'optimisation soit réussie, il faut que le dossier contenant les fichiers temporaires de Windows dispose d'un espace permettant d'accueillir l'ensemble de données au moins deux fois. L'optimisation est effectuée sur une copie de la base de données et les fichiers sont échangés si le processus est réussi. Le meilleur moment pour effectuer l'optimisation est directement après la vérification et/ou la mise à jour de la position et de l'orientation de l'ensemble de données. Cependant, si le jeu de données est volumineux et que plusieurs itérations de transformation sont nécessaires pour positionner précisément le jeu de données, il peut être préférable d'optimiser le jeu de données avant et après le processus de transformation.
Transformation
Le nuage de points peut devoir être positionné et orienté s'il n'est pas exactement dans la bonne position et orientation. Dans un premier temps, les transformations sont appliquées aux données de coordonnées et aux requêtes sous forme d'opération matricielle lorsque les données sont interfacées. Cela permet de repositionner rapidement le nuage sans avoir à mettre à jour l'ensemble de la base de données. Les entités distinctes Visualisation de points de nuage et Section de points de nuage ne sont pas mises à jour lorsque le jeu de données de points de nuage est transformé, car il est probable qu'elles ne soient plus positionnées correctement. Il est préférable de les supprimer, mais elles peuvent être mises à jour manuellement. Lorsque la carte spatiale est générée, les points de coordonnées sont transformés au cours du processus et la matrice de transformation interne est réinitialisée.
Préparation d'un ensemble de données de points de nuage pour la modélisation
Il existe trois options pour importer des données de levés Cloud Point dans l'application. Les données peuvent être importées à partir de fichiers texte, d'un fichier e57 ou d'une base de données de nuages de points existante.
Importation de points de données à partir d'un fichier texte
Afin d'utiliser un nuage de points laser dans PolyCAD, les données doivent être converties en une base de données de nuages de points (pcdb). Les données d'un fichier texte peuvent être transformées en une base de données de nuages de points à l'aide de l'option de la barre d'outils. Sélectionnez l'onglet Relevés de points de nuage et dans le groupe Importer/Convertir, il y a un bouton intitulé Importer le texte dans la base de données.

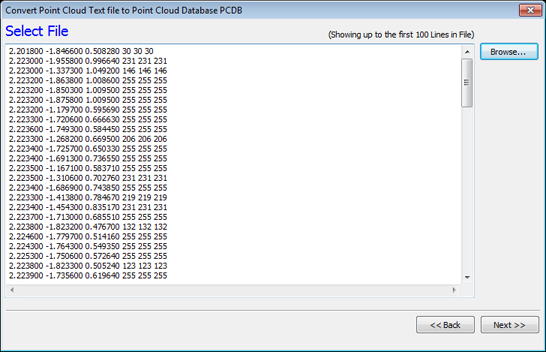
Cliquez sur le bouton pour afficher l'assistant d'importation. La première page présente le processus d'importation d'un ensemble de données.
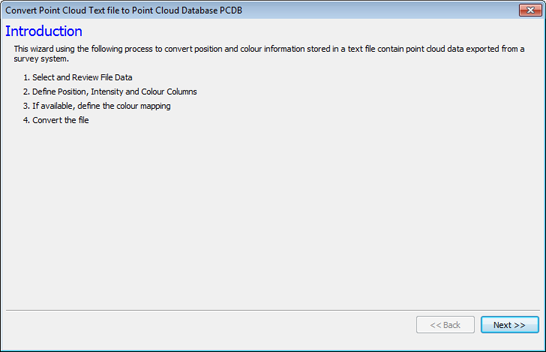
Cliquez sur le bouton "Suivant" pour afficher la page suivante. Cette page permet de sélectionner le fichier texte à importer et d'afficher les 1 100 premières lignes du fichier pour avoir un aperçu de la structure des données. Appuyez sur le bouton "Suivant" pour continuer.
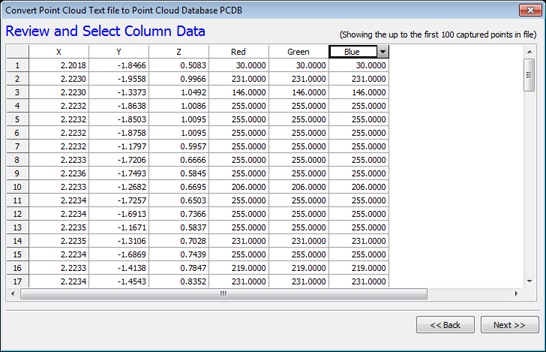
Ensuite, les 100 premières lignes du fichier texte sont examinées pour identifier les valeurs des coordonnées et toute couleur potentielle sous forme de valeurs RVB ou d'intensité. Une analyse est effectuée pour identifier le nombre le plus courant de paramètres numériques sur chaque ligne en tenant compte du format des valeurs séparées par des espaces, des virgules ou des tabulations. Ces lignes sont considérées comme celles qui contiennent des données de coordonnées. Les lignes avec un nombre différent de paramètres sont ignorées. Le résultat de cette analyse est affiché sur la page suivante, appliqué aux 100 premières lignes. Les en-têtes de colonne identifient les paramètres de coordonnées X, Y et Z. Les colonnes supplémentaires peuvent contenir des paramètres de couleur ou d'intensité. Des colonnes supplémentaires peuvent contenir des paramètres de couleur ou d'intensité et peuvent être sélectionnées pour être importées en modifiant le menu déroulant pour catégoriser le paramètre. Dans le cas de la couleur, une sélection doit être faite pour les trois composantes Rouge, Vert et Bleu. Le bouton Suivant sera indisponible si une sélection de couleur non valide est faite. Les points sont affichés dans une seule couleur si aucune information n'est disponible.
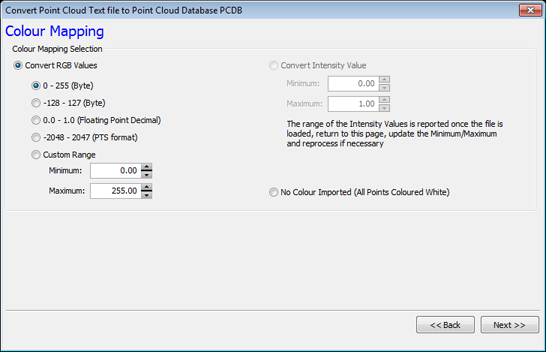
Cliquez sur le bouton "Suivant". Si des informations sur la couleur ou l'intensité sont disponibles et sont sélectionnées pour être importées, la page suivante offre la possibilité de définir le mappage des plages de valeurs des paramètres de couleur en RVB ou en intensité. Sélectionnez la plage de valeurs la plus appropriée en fonction de votre expérience et d'un examen des données de prévisualisation. Cliquez sur "Suivant" pour continuer. Notez que si la couleur ou n'est pas disponible, cette page est ignorée.
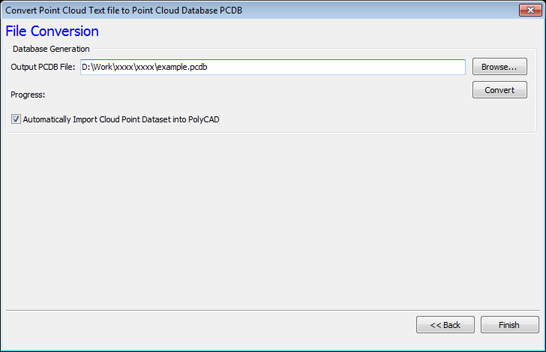
La page suivante définit le nom du fichier de la base de données des nuages de points. Cliquez sur le bouton "Convertir" pour commencer le processus d'importation. Si vous cochez la case "Importer automatiquement" les données de points de nuage dans PolyCAD, l'entité de données de points de nuage sera automatiquement générée dans le projet actuel une fois le processus terminé. Le processus d'importation prendra du temps. Une fois terminé, cliquez sur "Terminer".
Importation d'un scan laser à partir d'un fichier au format e57
Le format e57 est un fichier de données numériques contenant à la fois des points et des données d'image associées. Les données ponctuelles peuvent être stockées dans le fichier en virgule flottante ou sous forme de données entières compressées. L'un des avantages du format e57 est que le contenu du fichier est décrit sans qu'il soit nécessaire de définir ce que représente chaque flux de données et, dans le cas de la couleur ou de l'intensité, de définir la plage valide des données. Les fichiers de données E57 sont transformés en une base de données de nuages de points à l'aide de l'option de la barre d'outils. Sélectionnez l'onglet Cloud Point Surveys et dans le groupe Import / Convert, il y a un bouton intitulé Import E57 to Database.
Le format e57 est un fichier de données numériques contenant à la fois des points et des données d'image associées. Les données ponctuelles peuvent être stockées dans le fichier en virgule flottante ou sous forme de données entières compressées. L'un des avantages du format e57 est que le contenu du fichier est décrit sans qu'il soit nécessaire de définir ce que représente chaque flux de données et, dans le cas de la couleur ou de l'intensité, de définir la plage valide des données. Les fichiers de données E57 sont transformés en une base de données de nuages de points à l'aide de l'option de la barre d'outils. Sélectionnez l'onglet Cloud Point Surveys et dans le groupe Import / Convert, il y a un bouton intitulé Import E57 to Database.

Cliquez sur le bouton pour afficher l'assistant d'importation. La première page présente le processus d'importation d'un ensemble de données.
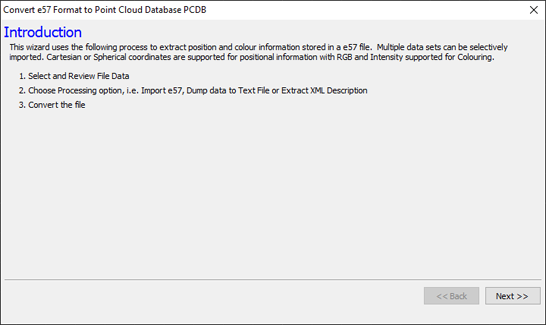
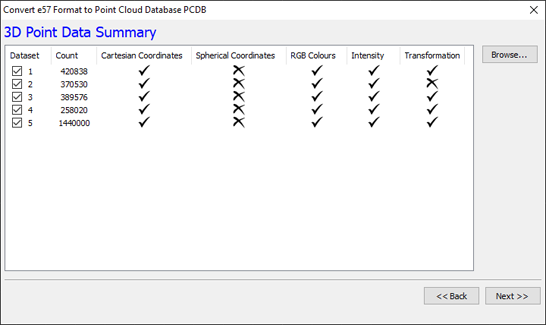
Cliquez sur le bouton "Next" (Suivant) pour afficher la page suivante. Cette page affiche un résumé des ensembles de données contenus dans le fichier, indiquant s'ils sont enregistrés en coordonnées cartésiennes ou sphériques, si des données RBG ou d'intensité sont associées aux points et si l'ensemble de données a une transformation associée. Les jeux de données individuels peuvent être supprimés de l'importation en utilisant la sélection de cases à cocher sur la gauche. Appuyez sur le bouton"Suivant" pour continuer.
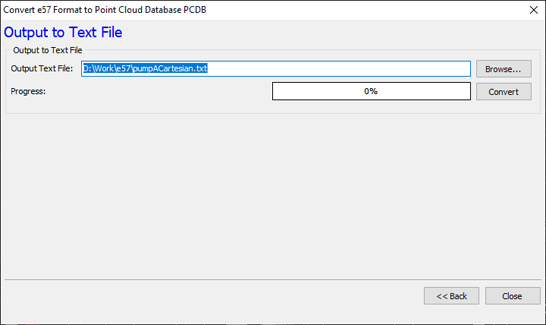
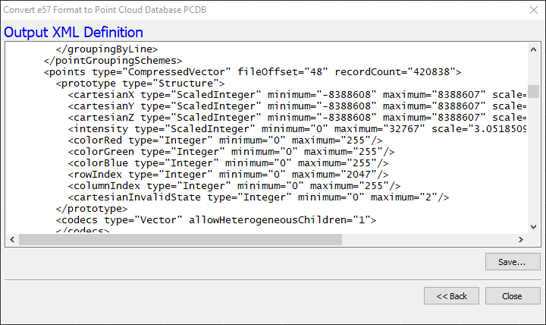
Ensuite, une série d'options sont présentées, notamment la sortie des données du fichier vers un fichier texte, l'affichage de la définition XML des données e57 intégrées dans les données du fichier, ainsi que l'option de conversion des données vers la base de données des nuages de points.
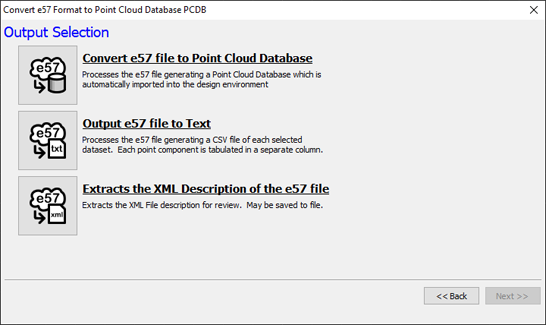
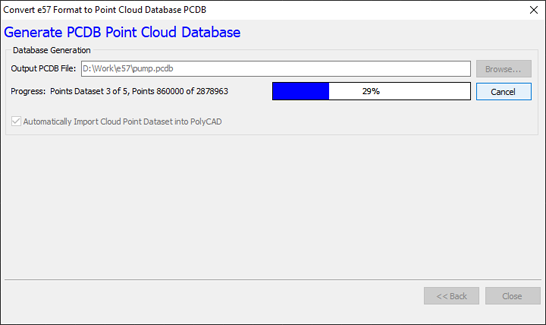
La première option permet de créer une base de données de nuages de points. Le nom du fichier est défini et le processus de conversion des données peut être lancé. Par défaut, les données seront automatiquement ajoutées au modèle 3D, mais cette option peut être désactivée en utilisant la case à cocher fournie. Une fois la conversion terminée, appuyez sur le bouton "Fermer" pour revenir à l'environnement de modélisation 3D.
La deuxième option permet d'extraire les données e57 vers un fichier texte afin de vérifier la qualité des données et, en cas d'erreur de décompression des données, d'identifier l'endroit du flux de données où cela se produit. Définissez le nom du fichier texte et appuyez sur "Convert" pour effectuer la transformation.
La dernière option affiche la définition XML de l'e57, ce qui permet d'examiner le contenu de la définition. Les données qui identifient le nombre de points et le contenu de chaque bloc de données sont particulièrement intéressantes. Elles peuvent être utilisées pour confirmer que les données ont été correctement transformées en une base de données de nuages de points.
Importation d'un ensemble de données de points de nuage existant
Si un jeu de données de points de nuage est déjà disponible, sélectionnez l'onglet Levés de points de nuage et, dans le groupe Points de nuage, un bouton intitulé "Jeu de données de points de nuage".
Si un jeu de données de points de nuage est déjà disponible, sélectionnez l'onglet Levés de points de nuage et, dans le groupe Points de nuage, un bouton intitulé "Jeu de données de points de nuage".

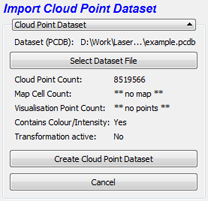
Dans la fenêtre Attributs, le formulaire suivant (illustré à gauche) s'affiche. Cliquez sur le bouton "Select Dataset File" pour sélectionner le fichier de base de données des nuages de points. Le formulaire (image de droite) affiche des informations sommaires sur le jeu de données, notamment le nombre de points de nuage, le nombre de cellules de carte spatiale, la disponibilité du jeu de données de visualisation, la couleur et les informations de transformation. Cliquez sur le bouton "Create Cloud Point Dataset" pour continuer.
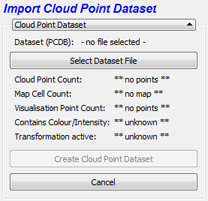
La visualisation principale est stockée dans un fichier séparé et peut ne pas être présente. Si c'est le cas, une boîte dont l'étendue est égale à celle de l'ensemble de données sera affichée.
Création de l'ensemble de données de visualisation
Le jeu de données de visualisation principal est un sous-ensemble du jeu de données global du nuage de points. S'il n'y a pas de carte, il est échantillonné uniformément à partir du jeu de données dans l'ordre où les points apparaissent dans la base de données. S'il y a une carte, un échantillonnage uniforme est effectué à partir de la carte.
La visualisation est générée en spécifiant le nombre de points à afficher dans le nombre d'échantillons. En fin de compte, ce nombre est déterminé par les performances graphiques de l'ordinateur sur lequel il fonctionne. Cependant, lorsque le nombre de points visibles augmente, la scène peut commencer à perdre de sa définition en devenant un bloc de couleur solide. Une fois qu'une valeur a été saisie, cliquez sur le bouton "Sample Visualisation Points".
Le jeu de données de visualisation principal est un sous-ensemble du jeu de données global du nuage de points. S'il n'y a pas de carte, il est échantillonné uniformément à partir du jeu de données dans l'ordre où les points apparaissent dans la base de données. S'il y a une carte, un échantillonnage uniforme est effectué à partir de la carte.
La visualisation est générée en spécifiant le nombre de points à afficher dans le nombre d'échantillons. En fin de compte, ce nombre est déterminé par les performances graphiques de l'ordinateur sur lequel il fonctionne. Cependant, lorsque le nombre de points visibles augmente, la scène peut commencer à perdre de sa définition en devenant un bloc de couleur solide. Une fois qu'une valeur a été saisie, cliquez sur le bouton "Sample Visualisation Points".
Découpage de l'ensemble de données de visualisation et échantillonnage géométrique
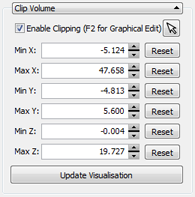
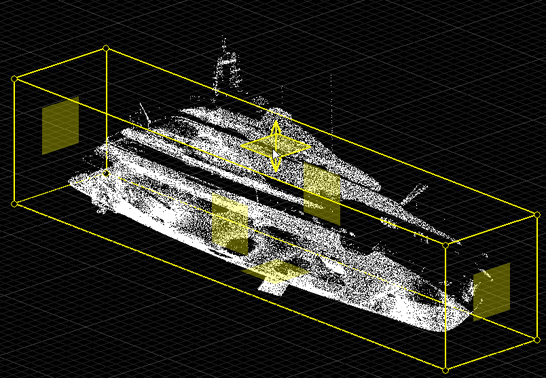
L'ensemble de données du nuage de points peut être découpé dans l'espace à l'aide d'une boîte pour éliminer les zones du nuage de points qui ne sont pas nécessaires ou pour se concentrer sur des zones de détail particulières. Cette fonction est utilisée pour limiter la visualisation du jeu de données et, éventuellement, la gamme de données échantillonnées à partir du nuage de points par les fonctions d'analyse. Elle ne supprime aucune donnée stockée dans la base de données des nuages de points.
Le volume écrêté est spécifié à l'aide des valeurs du groupe Volume écrêté. Activez la case à cocher pour activer l'écrêtage. En outre, le volume d'écrêtage peut être manipulé de manière interactive dans la vue graphique lors de l'édition graphique, en utilisant le raccourci F2 ou "Cloud Points Dataset -> Edit" dans le menu contextuel. Une boîte de volume représentant les limites de l'écrêtage peut également être dessinée de manière interactive en cliquant sur le bouton Select (Sélectionner) dans le groupe Clip Volume (Volume d'écrêtage).
L'ensemble de données du nuage de points peut être découpé dans l'espace à l'aide d'une boîte pour éliminer les zones du nuage de points qui ne sont pas nécessaires ou pour se concentrer sur des zones de détail particulières. Cette fonction est utilisée pour limiter la visualisation du jeu de données et, éventuellement, la gamme de données échantillonnées à partir du nuage de points par les fonctions d'analyse. Elle ne supprime aucune donnée stockée dans la base de données des nuages de points.
Le volume écrêté est spécifié à l'aide des valeurs du groupe Volume écrêté. Activez la case à cocher pour activer l'écrêtage. En outre, le volume d'écrêtage peut être manipulé de manière interactive dans la vue graphique lors de l'édition graphique, en utilisant le raccourci F2 ou "Cloud Points Dataset -> Edit" dans le menu contextuel. Une boîte de volume représentant les limites de l'écrêtage peut également être dessinée de manière interactive en cliquant sur le bouton Select (Sélectionner) dans le groupe Clip Volume (Volume d'écrêtage).
|
|
Pour afficher la couleur, vérifiez les données du point d'ombrage dans le groupe Réglage de la couleur de visualisation. Si la couleur capturée est faible, la luminosité et le contraste peuvent être ajustés pour tenter d'améliorer la qualité. L'option Améliorer l'intensité de la couleur remappe la couleur sur un modèle rouge-vert et peut mettre en évidence les points qui correspondent à la couleur de fond.
|
|
Carte d'optimisation spatiale
La carte d'optimisation spatiale optimise la base de données en une structure où la position des points dans des zones particulières peut être rapidement identifiée dans le fichier. La carte améliore considérablement le temps nécessaire pour générer une section ou un volume de visualisation et est nécessaire pour la validation de la surface. Pour commencer le processus d'optimisation, cliquez sur le bouton "Generate Map"... dans le groupe Dataset Optimisation Map.
La carte d'optimisation spatiale optimise la base de données en une structure où la position des points dans des zones particulières peut être rapidement identifiée dans le fichier. La carte améliore considérablement le temps nécessaire pour générer une section ou un volume de visualisation et est nécessaire pour la validation de la surface. Pour commencer le processus d'optimisation, cliquez sur le bouton "Generate Map"... dans le groupe Dataset Optimisation Map.
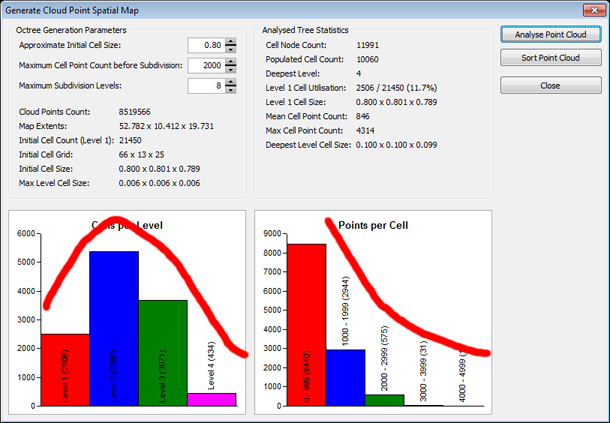
Le formulaire Génération de cartes spatiales est utilisé pour définir les paramètres utilisés pour générer la carte et afficher l'analyse lorsque les paramètres sont appliqués aux données. Contrôle des paramètres :
Le nombre de cellules (nombre initial de cellules) est compris entre 20000 et 30000. La taille approximative des cellules initiales doit être choisie automatiquement mais peut être ajustée.
Pour éviter que le nombre maximum de cellules se trouve dans le premier ou le dernier niveau (graphique à barres de gauche). Ce graphique doit être en forme de bosse.
Éliminer toutes les cellules ayant un nombre de points trop élevé en les subdivisant et en générant plus de niveaux. Idéalement, nous voulons environ 2000 points par cellule, mais si l'ensemble de données est important, il peut être nécessaire d'augmenter cette valeur pour éviter d'avoir besoin de plus de 8 niveaux. Pour les petits ensembles de données, cette valeur peut être réduite. À cet égard, le diagramme à barres des points par cellule devrait montrer qu'à mesure que le nombre de points par cellule augmente, le nombre de cellules peuplées devrait diminuer. En cliquant sur le bouton Analyse du nuage de points, l'analyse est effectuée et un rapport est établi.
- La taille des cellules de la grille initiale
- Le nombre de points dans une cellule avant la subdivision à un nouveau niveau d'arbre
- Le nombre maximum de niveaux de l'arbre
Le nombre de cellules (nombre initial de cellules) est compris entre 20000 et 30000. La taille approximative des cellules initiales doit être choisie automatiquement mais peut être ajustée.
Pour éviter que le nombre maximum de cellules se trouve dans le premier ou le dernier niveau (graphique à barres de gauche). Ce graphique doit être en forme de bosse.
Éliminer toutes les cellules ayant un nombre de points trop élevé en les subdivisant et en générant plus de niveaux. Idéalement, nous voulons environ 2000 points par cellule, mais si l'ensemble de données est important, il peut être nécessaire d'augmenter cette valeur pour éviter d'avoir besoin de plus de 8 niveaux. Pour les petits ensembles de données, cette valeur peut être réduite. À cet égard, le diagramme à barres des points par cellule devrait montrer qu'à mesure que le nombre de points par cellule augmente, le nombre de cellules peuplées devrait diminuer. En cliquant sur le bouton Analyse du nuage de points, l'analyse est effectuée et un rapport est établi.
Une fois qu'un ensemble de paramètres a été identifié, appuyez sur le bouton "Trier le nuage de points". Ce processus prendra un certain temps.
Transformation de l'ensemble de données
Si l'ensemble de données n'est pas dans la position ou l'orientation correcte, sa position peut être modifiée à l'aide des outils de transformation standard disponibles à partir de l'un des onglets principaux. La transformation de l'ensemble de données par rapport à une caractéristique géométrique peut être réalisée en introduisant une section de point de nuage à l'emplacement afin que les points puissent être fixés. Un flux de travail potentiel pour aligner la ligne de base dans le nuage de points avec l'environnement de modélisation est le suivant.
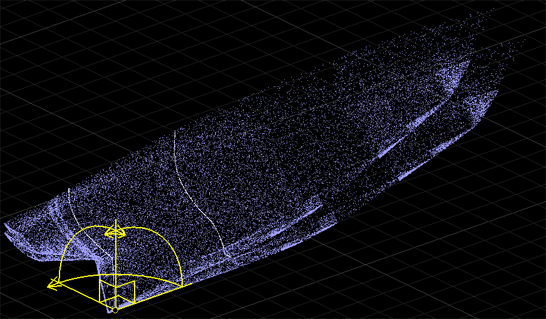
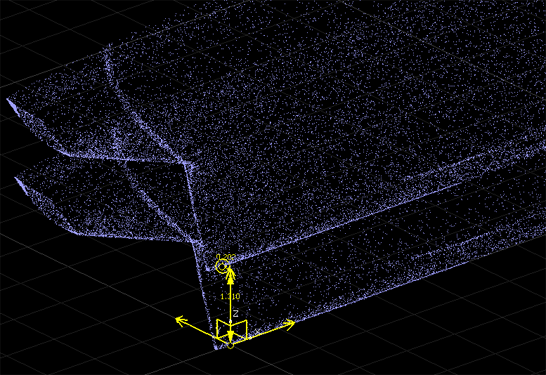
Deux sections de points de nuage seront utilisées pour identifier la ligne de base. Les sections de points de nuage offrent un accrochage permettant de tracer une polyligne entre elles. En faisant pivoter la polyligne pour qu'elle soit orientée selon l'axe X, nous orientons le nuage de points dans le logiciel. Par la suite, la translation peut être utilisée pour aligner la position du nuage de points.
Créez deux sections de points de nuage qui coupent toutes deux la ligne de base du nuage de points. Une section doit être aussi proche que possible d'une origine telle que la perpendiculaire arrière, bien que dans l'exemple ci-dessous, la ligne de base de la coque ne s'étende pas aussi loin vers l'arrière.
Si l'ensemble de données n'est pas dans la position ou l'orientation correcte, sa position peut être modifiée à l'aide des outils de transformation standard disponibles à partir de l'un des onglets principaux. La transformation de l'ensemble de données par rapport à une caractéristique géométrique peut être réalisée en introduisant une section de point de nuage à l'emplacement afin que les points puissent être fixés. Un flux de travail potentiel pour aligner la ligne de base dans le nuage de points avec l'environnement de modélisation est le suivant.
Deux sections de points de nuage seront utilisées pour identifier la ligne de base. Les sections de points de nuage offrent un accrochage permettant de tracer une polyligne entre elles. En faisant pivoter la polyligne pour qu'elle soit orientée selon l'axe X, nous orientons le nuage de points dans le logiciel. Par la suite, la translation peut être utilisée pour aligner la position du nuage de points.
Créez deux sections de points de nuage qui coupent toutes deux la ligne de base du nuage de points. Une section doit être aussi proche que possible d'une origine telle que la perpendiculaire arrière, bien que dans l'exemple ci-dessous, la ligne de base de la coque ne s'étende pas aussi loin vers l'arrière.
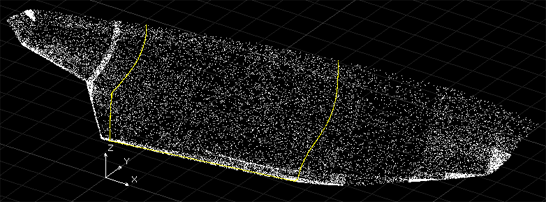
Ensuite, dessinez une polyligne attachée aux deux sections de points de nuage le long de la ligne de base.
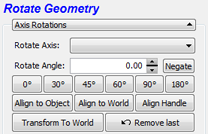
Masquez les sections de points de nuage pour éviter l'accrochage aux points. Sélectionnez l'ensemble de données de points de nuage et la polyligne. À l'aide de la transformation de rotation, accrochez la poignée d'édition à l'extrémité arrière de la polyligne. Dans l'outil de transformation, cliquez sur le bouton Aligner la poignée. À l'aide de la souris, sélectionnez l'arc de la poignée d'édition proche de l'axe le plus proche de la ligne de base et faites pivoter la poignée d'édition de manière à ce qu'elle s'accroche et s'aligne sur la polyligne. Répétez l'opération pour l'autre arc adjacent à l'axe.
|
|
Cliquez sur la "poignée d'alignement" pour désactiver le mode d'alignement et cliquez sur "Transform to World" pour appliquer une transformation qui fait pivoter la poignée d'édition dans le cadre de référence World. Cliquez sur le bouton "Rotation de la sélection" pour effectuer la transformation et terminer.
Sélectionnez l'ensemble de données de points de nuage et la polyligne et utilisez l'outil Translation pour déplacer l'ensemble de données de points de nuage en position. Les outils Plan et Polyligne peuvent être utilisés pour projeter les positions du nuage de points sur la ligne de base afin d'aligner la position longitudinale précise.
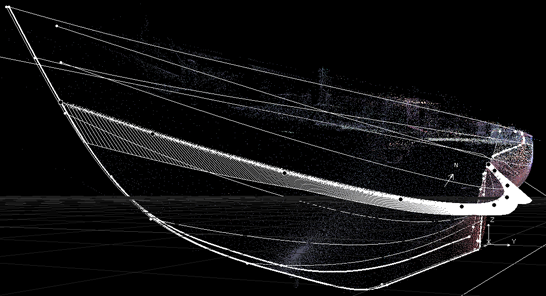
Sections de points de nuage
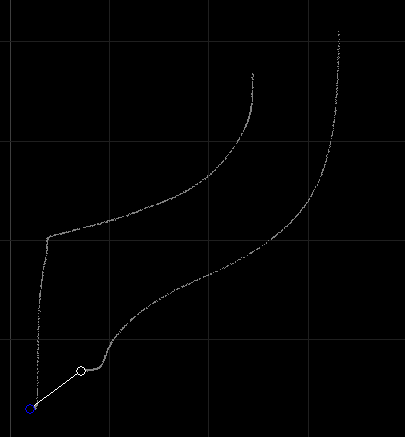
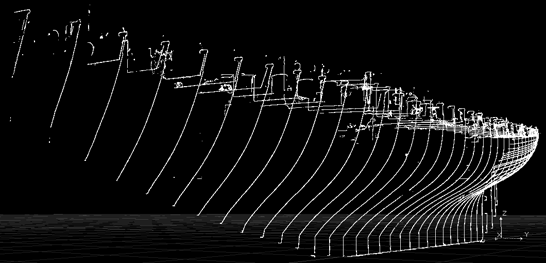
Les sections de points de nuage créent des coupes transversales dans le jeu de données permettant la visualisation, la numérisation et la génération de courbes. Les sections de points de nuage sont générées en effectuant une coupe planaire à travers le nuage et en sélectionnant les points situés à une certaine distance du plan (la moitié du paramètre d'épaisseur spécifié). Les sections de points de nuage peuvent être basées sur des plans X, Y ou Z ou référencées à des entités planes dans le modèle, ce qui permet d'autres définitions. Des polylignes peuvent être générées à partir des sections de points de nuage en éditant (F2) et en faisant glisser un rectangle afin de sélectionner les points pour générer la courbe.
Notez que les sections de nuages ne sont pas stockées et sont automatiquement régénérées lorsque le fichier de géométrie est chargé.
Les sections de points de nuage créent des coupes transversales dans le jeu de données permettant la visualisation, la numérisation et la génération de courbes. Les sections de points de nuage sont générées en effectuant une coupe planaire à travers le nuage et en sélectionnant les points situés à une certaine distance du plan (la moitié du paramètre d'épaisseur spécifié). Les sections de points de nuage peuvent être basées sur des plans X, Y ou Z ou référencées à des entités planes dans le modèle, ce qui permet d'autres définitions. Des polylignes peuvent être générées à partir des sections de points de nuage en éditant (F2) et en faisant glisser un rectangle afin de sélectionner les points pour générer la courbe.
Notez que les sections de nuages ne sont pas stockées et sont automatiquement régénérées lorsque le fichier de géométrie est chargé.
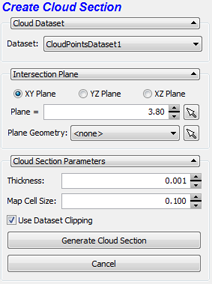
Pour créer une nouvelle section de point de nuage, sélectionnez l'onglet Relevés de points de nuage et dans le groupe Points de nuage, vous trouverez un bouton intitulé "Sections de points de nuage".

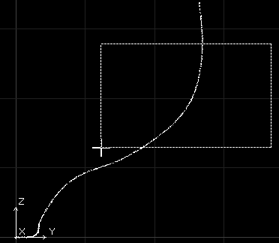
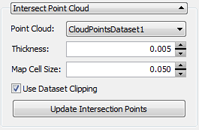
L'outil Créer une section de nuage apparaît dans la fenêtre Attributs. Spécifiez la position du type de plan dans le groupe d'intersections. Vous pouvez le faire de manière numérique en utilisant les contrôles de l'écran ou de manière interactive en utilisant les boutons avec les icônes de flèche. Les sections de nuages peuvent être définies sur les plans principaux ou faire référence à une entité Plan. L'épaisseur de la section et la taille de la carte peuvent être sélectionnées dans les paramètres de la section de nuage. Une case à cocher est fournie pour clipper les données au même volume que la visualisation. La position du plan de section est indiquée graphiquement à l'écran sous la forme d'un rectangle de délimitation affiché dans la vue 3D. Appuyez sur le bouton "Generate Cloud Section" pour générer l'entité de section de nuage une fois que les paramètres ont été configurés.
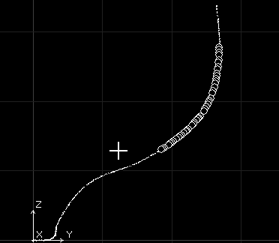
Des courbes individuelles (polylignes) peuvent être générées à partir de la section en sélectionnant des points à échantillonner en mode édition, c'est-à-dire en utilisant le raccourci F2 ou en cliquant sur le bouton droit de la souris dans le menu "Section de points de nuage -> Editer". La souris peut être utilisée pour faire glisser et sélectionner des zones de la coupe de section. Les boutons Shift et Ctrl peuvent être utilisés pour effectuer des sélections supplémentaires. Si la carte des sections de points de nuage est visible, les cellules de la grille peuvent être ajoutées à la sélection en cliquant sur les cellules. Cette approche permet d'éviter l'inclusion de points de nuage non désirés. Une fois qu'une sélection adéquate de points a été effectuée, une polyligne peut être générée en cliquant sur le bouton "Generate Polyline" dans les propriétés de l'entité.
|
|
|
Les limites de la section des points de nuage peuvent être rattachées à des entités auxiliaires de visualisation des nuages.
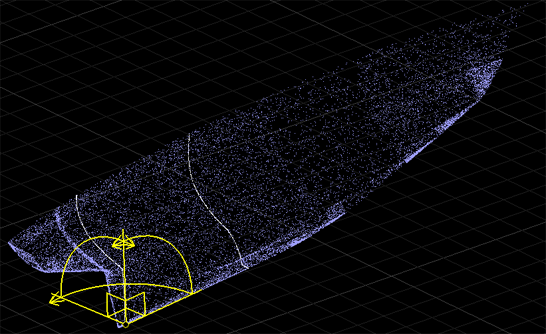
Visualisation auxiliaire du nuage
L'entité Auxiliary Cloud Visualisation fournit des vues supplémentaires du nuage de points. Plutôt que de rééchantillonner continuellement la visualisation principale pour se concentrer sur les détails. L'entité présente la même visualisation que l'ensemble de données de points du nuage. En outre, les limites d'une visualisation auxiliaire du nuage peuvent être utilisées pour limiter l'étendue d'une section de points de nuage. Par conséquent, les entités Visualisation des nuages et Section peuvent être utilisées en combinaison pour développer un aperçu d'une zone d'intérêt particulière sans affecter les entités déjà configurées pour visualiser l'ensemble du levé.
L'entité Auxiliary Cloud Visualisation fournit des vues supplémentaires du nuage de points. Plutôt que de rééchantillonner continuellement la visualisation principale pour se concentrer sur les détails. L'entité présente la même visualisation que l'ensemble de données de points du nuage. En outre, les limites d'une visualisation auxiliaire du nuage peuvent être utilisées pour limiter l'étendue d'une section de points de nuage. Par conséquent, les entités Visualisation des nuages et Section peuvent être utilisées en combinaison pour développer un aperçu d'une zone d'intérêt particulière sans affecter les entités déjà configurées pour visualiser l'ensemble du levé.
|

|
|
Échantillonnage du nuage de points lors de l'ajustement des courbes topologiques en X
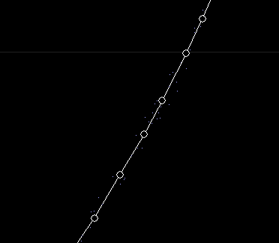
Les ensembles de données de points de nuages peuvent être échantillonnés lors de la génération de courbes de topologie X à l'aide des outils d'ajustement par les moindres carrés. Cet outil offre le "meilleur des mondes" du point de vue qu'il peut ajuster des courbes, de manière sélective, à n'importe quelle géométrie, y compris les nuages de points, et la courbe ou les segments de courbe résultants peuvent être examinés du point de vue de la qualité de la courbure ou de la déviation par rapport aux données d'origine. Il est alors possible de choisir de resélectionner le plan d'ajustement ou la géométrie d'intersection, de modifier le nombre de points de contrôle ou d'appliquer un lissage.
L'outil d'ajustement de la courbe des moindres carrés de X-Topology se trouve dans la barre d'outils de modélisation de surface de X-Topology, dans le groupe de courbes de X-Topology, avec la légende "Intersection des moindres carrés". Une fois qu'un plan d'intersection a été défini, l'option d'intersecter le nuage de points avec une section de point de nuage et d'ajouter les points sélectionnés à la sélection d'ajustement devient disponible. Pour plus de détails sur la modélisation des surfaces, il convient de se reporter aux informations sur la modélisation avec X-Topology.
Les ensembles de données de points de nuages peuvent être échantillonnés lors de la génération de courbes de topologie X à l'aide des outils d'ajustement par les moindres carrés. Cet outil offre le "meilleur des mondes" du point de vue qu'il peut ajuster des courbes, de manière sélective, à n'importe quelle géométrie, y compris les nuages de points, et la courbe ou les segments de courbe résultants peuvent être examinés du point de vue de la qualité de la courbure ou de la déviation par rapport aux données d'origine. Il est alors possible de choisir de resélectionner le plan d'ajustement ou la géométrie d'intersection, de modifier le nombre de points de contrôle ou d'appliquer un lissage.
L'outil d'ajustement de la courbe des moindres carrés de X-Topology se trouve dans la barre d'outils de modélisation de surface de X-Topology, dans le groupe de courbes de X-Topology, avec la légende "Intersection des moindres carrés". Une fois qu'un plan d'intersection a été défini, l'option d'intersecter le nuage de points avec une section de point de nuage et d'ajouter les points sélectionnés à la sélection d'ajustement devient disponible. Pour plus de détails sur la modélisation des surfaces, il convient de se reporter aux informations sur la modélisation avec X-Topology.
|
|
Validation
Bien que la comparaison visuelle de la surface avec le nuage de points donne une impression de précision, seule l'analyse quantitative peut fournir un retour d'information exploitable sur la surface afin d'appuyer des décisions telles que le moment où la surface est dans les limites de la tolérance ou les zones de la surface sur lesquelles il faut se concentrer lorsqu'elle ne l'est pas. En utilisant une approche similaire à celle de l'isophote et de la courbure de la surface, les mesures de distance de la surface par rapport au nuage de points peuvent être affichées en utilisant des ombres colorées.
Processus d'analyse
Pour présenter une vue de la précision compte tenu de la quantité de données disponibles, il est nécessaire d'utiliser des statistiques. Il est possible d'utiliser une analyse élaborée, mais l'utilisation d'approches et de termes ou la présentation de résultats qui ne sont pas familiers aux utilisateurs ne sont pas utiles. En outre, compte tenu de la quantité de données impliquées, il est nécessaire d'élaborer des algorithmes capables de traiter la surface en un temps acceptable. L'approche échantillonne le nuage de points à chaque point de maillage visuel dérivé de la surface. Les points du nuage à proximité de chaque point de maillage sont sélectionnés, à l'aide d'un volume de boîte dont les dimensions sont définies par l'utilisateur, et la distance normale à la surface est analysée pour développer les statistiques de moyenne, d'écart type, de minimum et de maximum. Cette méthode fonctionne bien sur la majeure partie de la surface, mais les résultats peuvent devenir confus le long de la tige, où il est possible d'échantillonner à travers des caractéristiques telles que la ligne centrale ou autour d'arêtes vives telles que le tableau arrière. Actuellement, le logiciel ne détecte pas ces scénarios, bien qu'il existe une option pour empêcher l'échantillonnage ponctuel sur le plan central. Comme il peut y avoir de nombreux scénarios où soit la surface diffère intentionnellement des données du levé du nuage de points, soit l'échantillonnage capture des points supplémentaires du nuage, un formulaire supplémentaire fournissant une sélection plus approfondie des résultats est fourni, qui affiche des comparaisons graphiques des informations d'analyse intermédiaire au niveau de la surface, du patch individuel et du point de maillage.
Bien que la comparaison visuelle de la surface avec le nuage de points donne une impression de précision, seule l'analyse quantitative peut fournir un retour d'information exploitable sur la surface afin d'appuyer des décisions telles que le moment où la surface est dans les limites de la tolérance ou les zones de la surface sur lesquelles il faut se concentrer lorsqu'elle ne l'est pas. En utilisant une approche similaire à celle de l'isophote et de la courbure de la surface, les mesures de distance de la surface par rapport au nuage de points peuvent être affichées en utilisant des ombres colorées.
Processus d'analyse
Pour présenter une vue de la précision compte tenu de la quantité de données disponibles, il est nécessaire d'utiliser des statistiques. Il est possible d'utiliser une analyse élaborée, mais l'utilisation d'approches et de termes ou la présentation de résultats qui ne sont pas familiers aux utilisateurs ne sont pas utiles. En outre, compte tenu de la quantité de données impliquées, il est nécessaire d'élaborer des algorithmes capables de traiter la surface en un temps acceptable. L'approche échantillonne le nuage de points à chaque point de maillage visuel dérivé de la surface. Les points du nuage à proximité de chaque point de maillage sont sélectionnés, à l'aide d'un volume de boîte dont les dimensions sont définies par l'utilisateur, et la distance normale à la surface est analysée pour développer les statistiques de moyenne, d'écart type, de minimum et de maximum. Cette méthode fonctionne bien sur la majeure partie de la surface, mais les résultats peuvent devenir confus le long de la tige, où il est possible d'échantillonner à travers des caractéristiques telles que la ligne centrale ou autour d'arêtes vives telles que le tableau arrière. Actuellement, le logiciel ne détecte pas ces scénarios, bien qu'il existe une option pour empêcher l'échantillonnage ponctuel sur le plan central. Comme il peut y avoir de nombreux scénarios où soit la surface diffère intentionnellement des données du levé du nuage de points, soit l'échantillonnage capture des points supplémentaires du nuage, un formulaire supplémentaire fournissant une sélection plus approfondie des résultats est fourni, qui affiche des comparaisons graphiques des informations d'analyse intermédiaire au niveau de la surface, du patch individuel et du point de maillage.
Résultats
Les résultats sont présentés sous la forme d'une surface ombrée et un certain nombre d'options différentes sont disponibles :
Distance absolue : ombrage la surface sur la base de la distance absolue de la surface par rapport à la distance moyenne des points du nuage échantillonnés normalement à la surface. Cela donne une impression générale de la précision de la surface.
Les résultats sont présentés sous la forme d'une surface ombrée et un certain nombre d'options différentes sont disponibles :
Distance absolue : ombrage la surface sur la base de la distance absolue de la surface par rapport à la distance moyenne des points du nuage échantillonnés normalement à la surface. Cela donne une impression générale de la précision de la surface.

La distance latérale nuance la surface en fonction de la distance de la surface à la distance moyenne des points de nuage échantillonnés normalement à la surface et utilise des couleurs différentes selon le signe de la distance. Cela met en évidence, en plus de la précision, la variation de l'ajustement de la surface de chaque côté de la "surface" des points de nuage.

Écart type absolu : est similaire à la distance absolue, sauf qu'il tient compte du niveau de bruit ou de dispersion dans le nuage de points. Il peut être nécessaire d'utiliser l'écart-type dans les cas où les données bruitées ne permettent pas d'obtenir un niveau de confiance statistique élevé pour la tolérance sélectionnée.
Écart type unilatéral : combine les concepts de l'analyse de la distance unilatérale en utilisant l'écart type comme mesure.
Within Cloud (Absolute) : se colore en vert si une surface est trouvée entre les échantillons minimum et maximum du nuage de points, en rouge sinon.
Écart type unilatéral : combine les concepts de l'analyse de la distance unilatérale en utilisant l'écart type comme mesure.
Within Cloud (Absolute) : se colore en vert si une surface est trouvée entre les échantillons minimum et maximum du nuage de points, en rouge sinon.

À l'intérieur du nuage (côté) : les nuances sont vertes si la surface est trouvée entre les échantillons minimum et maximum du nuage de points, sinon bleu si la distance de la surface est inférieure à l'échantillon minimum, rouge si la distance de la surface est supérieure à l'échantillon maximum.

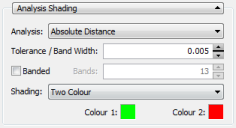
Les résultats peuvent être présentés en deux couleurs (absolues) ou trois (faces) en surbrillance dans ou en dehors de la tolérance. La présentation peut également être affichée sous forme de bandes de couleurs où la valeur de tolérance contrôle l'épaisseur de chaque bande. Cette présentation des zones de surbrillance permet une comparaison plus fine des distances entre la surface et le nuage de points sur l'ensemble du domaine. Les régions où il n'y a pas de données de nuage de points pour valider la précision sont rendues transparentes.

Valider la surface
Pour présenter la validation, créez une entité de comparaison nuage/surface qui peut être trouvée sur la barre d'outils Cloud Point Surveys dans Cloud Points Group.
Pour présenter la validation, créez une entité de comparaison nuage/surface qui peut être trouvée sur la barre d'outils Cloud Point Surveys dans Cloud Points Group.

Sélectionnez le jeu de données et la surface à comparer. S'il n'y a qu'un seul jeu de données et qu'une seule surface, ils seront sélectionnés par défaut.
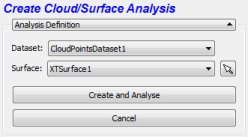
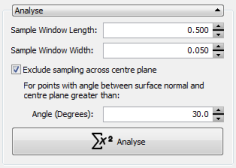
Étant donné qu'il faut un certain temps pour analyser le jeu de données de nuages par rapport à la surface, l'entité s'affichera initialement sous la forme du contour des parcelles de surface. C'est également le cas lors du rechargement à partir d'un fichier car les résultats ne sont pas stockés. Appuyez sur le bouton Analyser pour générer les résultats. Une fenêtre de progression s'affiche indiquant l'état de l'analyse. La taille de la "fenêtre" du volume d'échantillon peut être ajustée. L'échantillonnage peut également être empêché d'analyser à travers le plan central lorsque la normale à la surface est supérieure à l'angle donné avec le plan central.
Une fois analysées, les options d'affichage deviennent disponibles. Comme illustré dans la section précédente, la surface peut être ombrée pour indiquer les tolérances en termes de distance absolue et latérale (signé), d'écart-type absolu et latéral (signé) et dans « l'épaisseur » du nuage. La tolérance est spécifiée dans le champ Tolérance. La précision peut également être affichée sous forme de bandes colorées, en cochant la case. Dans ce cas, le champ Tolérance spécifie la largeur des bandes et le nombre de bandes est défini dans le champ suivant. Le modèle de couleur d'ombrage est sélectionné dans le menu d'ombrage.
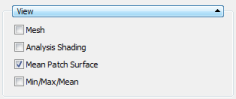
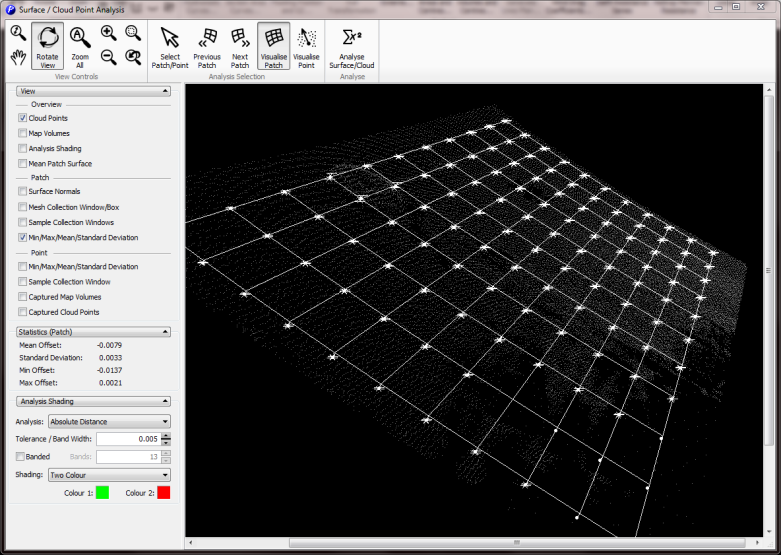
Plusieurs options d'affichage sont disponibles. L'option Maillage affiche la géométrie brute de la surface et peut être désactivée une fois que les informations d'analyse sont disponibles. La case à cocher Analysis Shading contrôle si l'ombrage est affiché. L'option Surface moyenne du patch affiche la géométrie de la surface corrigée à la position moyenne. L'affichage de cette option à côté du maillage d'origine fournit une autre indication visuelle des différences entre la surface et les points de nuage. La dernière option, Min/Max/Mean, affiche à chaque point de maillage de surface les positions moyenne, min et max des données échantillonnées. Cette option peut afficher une quantité importante d'informations qui ralentiront le logiciel en particulier pour les surfaces avec un grand nombre de patchs. Les mêmes informations peuvent être affichées pour des patchs et des points individuels à l'aide du formulaire Analyser la surface accessible depuis le groupe Statistiques globales.

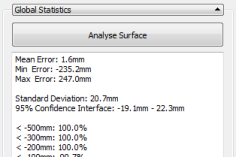
Le groupe de statistiques globales présente une évaluation numérique de la précision de la surface indiquant la moyenne globale, l'erreur minimale et maximale, l'écart type et l'intervalle de confiance à 95 %. Le pourcentage de la surface dans une tolérance particulière est également répertorié.
Analyse plus approfondie
Alors que la zone graphique principale de PolyCAD fournit un retour visuel sur la tolérance de la surface, il est parfois nécessaire de poser des questions plus approfondies sur ce qui se passe dans une zone spécifique ou autour d'une caractéristique spécifique de la surface. Chaque emplacement échantillonné sur la surface utilise un cuboïde avec un grand axe parallèle à la normale de la surface pour collecter des points. Ce processus de sélection est simpliste et peut collecter des points à partir de parties du nuage qui ne sont pas directement adjacentes à la surface. Par exemple, des points peuvent être échantillonnés de l'autre côté d'une articulation si l'angle du coin est particulièrement grand. Dans ces situations, la possibilité de vérifier visuellement la position des points de nuages par rapport à la surface dans des zones sélectionnées donne un aperçu des informations de tolérance présentées dans la vue graphique principale. Cette appréciation peut être utilisée pour régler la taille de la fenêtre d'échantillonnage Volume afin de réduire l'échantillonnage des points de nuages qui ne sont pas des zones directement adjacentes de la surface analysée.
Le formulaire d'analyse des points de surface/nuage permet aux points de nuage et à la surface d'être affichés ensemble. Des patchs individuels peuvent être sélectionnés pour une analyse plus approfondie et des patchs visualisés séquentiellement en parcourant la collection. La visualisation du nuage de points est contrainte au volume immédiatement autour du patch.
Alors que la zone graphique principale de PolyCAD fournit un retour visuel sur la tolérance de la surface, il est parfois nécessaire de poser des questions plus approfondies sur ce qui se passe dans une zone spécifique ou autour d'une caractéristique spécifique de la surface. Chaque emplacement échantillonné sur la surface utilise un cuboïde avec un grand axe parallèle à la normale de la surface pour collecter des points. Ce processus de sélection est simpliste et peut collecter des points à partir de parties du nuage qui ne sont pas directement adjacentes à la surface. Par exemple, des points peuvent être échantillonnés de l'autre côté d'une articulation si l'angle du coin est particulièrement grand. Dans ces situations, la possibilité de vérifier visuellement la position des points de nuages par rapport à la surface dans des zones sélectionnées donne un aperçu des informations de tolérance présentées dans la vue graphique principale. Cette appréciation peut être utilisée pour régler la taille de la fenêtre d'échantillonnage Volume afin de réduire l'échantillonnage des points de nuages qui ne sont pas des zones directement adjacentes de la surface analysée.
Le formulaire d'analyse des points de surface/nuage permet aux points de nuage et à la surface d'être affichés ensemble. Des patchs individuels peuvent être sélectionnés pour une analyse plus approfondie et des patchs visualisés séquentiellement en parcourant la collection. La visualisation du nuage de points est contrainte au volume immédiatement autour du patch.
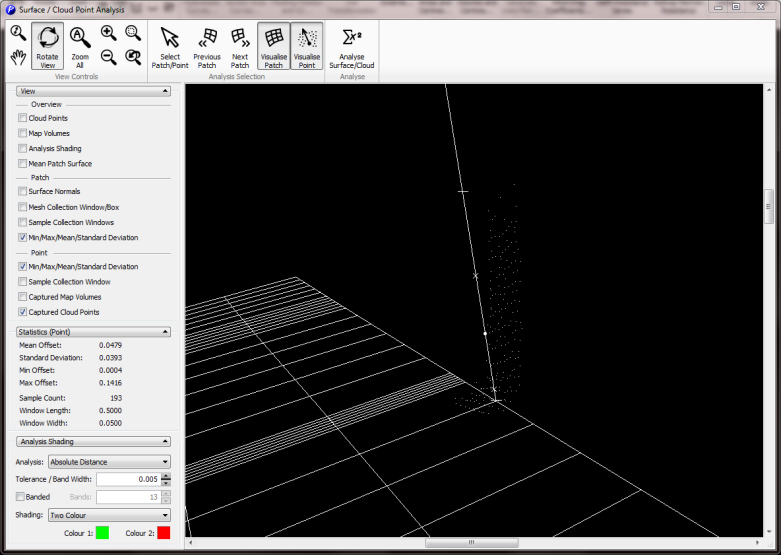
Une fois qu'un patch est affiché, l'analyse peut examiner les informations associées à un point d'échantillonnage individuel. En plus des fonctionnalités disponibles dans l'affichage graphique principal, il est possible d'afficher les cellules Cloud Dataset Map associées au point, la taille du volume capturé et les points d'échantillonnage capturés.
Alors pourquoi ne pas adapter une surface "moyenne" aux points de nuage
Considérant qu'une surface "moyenne" peut être calculée, pourquoi ne pas adapter la surface directement au Cloud Dataset. C'est certainement mathématiquement possible et une surface peut être ajustée lorsque les données sont bien réparties. Cependant, les données sont rarement ordonnées ou parfois même complètes, il y a des zones du nuage qui peuvent choisir de ne pas s'adapter, par exemple autour des appendices et il y a d'autres zones où le calcul de la position moyenne est un défi, comme autour d'un angle plus grand jointures.
D'un point de vue technique, ces défis peuvent être résolus en explorant l'utilisation de la détection de caractéristiques et en utilisant des algorithmes qui tolèrent les données manquantes. Cependant, il est désormais nécessaire d'orienter le logiciel en identifiant les zones du Cloud qui doivent être adaptées directement et ignorées. Cela ajoute une surcharge et une complexité supplémentaire à l'expérience utilisateur. On peut s'attendre à une mauvaise qualité de surface lors de la transition entre des zones d'ajustement bien définies et d'autres pour lesquelles les données sont limitées.
Ces types de défis sont déjà mis en évidence par l'entité X-Topology Surface Fit qui ajuste une surface aux courbes de lissage X-Topology. Les courbes lissées X-Topology créent un échantillon de données de bien meilleure qualité par rapport à un ensemble de données Cloud Point. Cependant, les petites entités surfaciques peuvent souvent se situer dans l'espacement entre les courbes de lissage ne produisant aucune donnée d'ajustement pour les patchs de surface associés. Il est possible d'éviter les mauvaises corrections en utilisant des algorithmes d'ajustement spécifiques, mais cela a introduit la situation décrite ci-dessus où la majorité de la surface est supportée avec précision et de bonne qualité, mais il peut y avoir d'autres zones qui ne le sont pas. Dans ce cas, comme les fonctionnalités sont petites, il peut être difficile de le mettre en évidence auprès des utilisateurs de manière évidente et informative.
Considérant qu'une surface "moyenne" peut être calculée, pourquoi ne pas adapter la surface directement au Cloud Dataset. C'est certainement mathématiquement possible et une surface peut être ajustée lorsque les données sont bien réparties. Cependant, les données sont rarement ordonnées ou parfois même complètes, il y a des zones du nuage qui peuvent choisir de ne pas s'adapter, par exemple autour des appendices et il y a d'autres zones où le calcul de la position moyenne est un défi, comme autour d'un angle plus grand jointures.
D'un point de vue technique, ces défis peuvent être résolus en explorant l'utilisation de la détection de caractéristiques et en utilisant des algorithmes qui tolèrent les données manquantes. Cependant, il est désormais nécessaire d'orienter le logiciel en identifiant les zones du Cloud qui doivent être adaptées directement et ignorées. Cela ajoute une surcharge et une complexité supplémentaire à l'expérience utilisateur. On peut s'attendre à une mauvaise qualité de surface lors de la transition entre des zones d'ajustement bien définies et d'autres pour lesquelles les données sont limitées.
Ces types de défis sont déjà mis en évidence par l'entité X-Topology Surface Fit qui ajuste une surface aux courbes de lissage X-Topology. Les courbes lissées X-Topology créent un échantillon de données de bien meilleure qualité par rapport à un ensemble de données Cloud Point. Cependant, les petites entités surfaciques peuvent souvent se situer dans l'espacement entre les courbes de lissage ne produisant aucune donnée d'ajustement pour les patchs de surface associés. Il est possible d'éviter les mauvaises corrections en utilisant des algorithmes d'ajustement spécifiques, mais cela a introduit la situation décrite ci-dessus où la majorité de la surface est supportée avec précision et de bonne qualité, mais il peut y avoir d'autres zones qui ne le sont pas. Dans ce cas, comme les fonctionnalités sont petites, il peut être difficile de le mettre en évidence auprès des utilisateurs de manière évidente et informative.